Rosa операционная система: Гордость русского IT-мира. Обзор и тестирование ROSA Linux / Информационная безопасность, Законы, Программы, ПО, сайты / iXBT Live
Содержание
Гордость русского IT-мира. Обзор и тестирование ROSA Linux / Информационная безопасность, Законы, Программы, ПО, сайты / iXBT Live
Думаю не стоит пояснять какая ситуация сейчас разворачивается во многих отраслях, где хоть как-то фигурирует Россия.
К сожалению, несмотря на все свои лозунги и философию, свободное ПО не смогло оказаться в стороне и многие разработчики присоединились к «охоте на ведьм». В этом материале мы познакомимся с отечественной операционной системой ROSA Linux, а также посмотрим, сможет ли российская разработка стать запасным аэродромом в случае часа X.
Содержание
- Установка
- Система
- Тест офиса и видео
- Тест игр
- Выводы
- Видеоверсия
ROSA Linux — это операционная система на базе ядра Linux, которая является форком некогда популярного французского Linux-дистрибутива MandrivaOS, что в свою очередь, был основан на наработках Red Hat Linux.
Несмотря на такую матрёшку, российской компанией-разработчиком «НТЦ ИТ РОСА» была проделана весомая работа по созданию собственной пакетной базы и соответствию требованиям безопасности ФСТЭК России и Министерства обороны.
Всего существует три редакции:
- ROSA Desktop Fresh — полностью бесплатная версия ОС для дома с обширным набором предустановленного ПО.
- ROSA Enterprise Desktop — платная версия ОС с долгосрочной поддержкой для бизнеса и организаций.
- ROSA Enterprise Linux Server — коммерческое решение нацеленное на создание защищённой серверной инфраструктуры.
Слишком долго расписывать отличия редакций и их компонентной базы не имеет никакого смысла, так как всё равно обычному пользователю доступна только базовая редакция OC — ROSA Desktop Fresh. Поэтому только укажу, что набор собственного ПО обширен, а описание каждого компонента заняло бы слишком много времени. Перейдём к установке системы.
Установка
В установке нет ничего сложного, ибо все компоненты заранее подготовлены разработчиками и доступны на официальном сайте проекта.
Для скачивания предлагается собственный инструмент записи — утилита ROSA Image Writer и сам ISO-образ готовой системы с рабочим окружением на выбор: Gnome 40 или KDE PLASMA 5. Выполним запись на носитель.
Выполним запись на носитель.
Вот и первая проблема при использовании отечественного ПО. При попытке записи образа на USB-носитель от фирмы Goodram, постоянно выдавалась ошибка, что не позволило записать образ системы. Пришлось обратиться к двум отдельным решениям: Rufus и Balena Etсher.
Возможно, проблема не стоит внимания, так как многие загрузчики страдают похожими капризами при использовании старых носителей или записи малоизвестных систем, но осадочек остался. Только при использовании Balena Ether не возникло никаких проблем в дальнейшем.
Для установки ROSA Linux применяется открытый инсталлятор Anaconda, который используется во многих популярных ОС: Fedora, CentoOS, Red Hat Enterprise Linux и т. п.
Выбор языкаВыбор использованияЗагрузкаЯзык установщика и системыВвод нужных данныхПроцесс установки
Первые приветственные окна посвящены настройки выбора и не должны вызвать затруднений. Выбираем желаемый язык, место установки, вводим данные пользователя и ждём окончания записи.
Видео установки
Система
Встречает нас слегка модифицированный Gnome 40 с красивыми обоями, нижней панелью и возможностью переноса файлов на рабочий стол. Разработчики постарались расположить иконки апплетов в логике Windows 10 для наиболее интуитивной навигации среди новичков. В основном же перед нами всё тот же Gnome 40 со всеми своими достоинствами и недостатками.
К чести разработчиков, обычному пользователю даже не требуется открывать терминал для управления системой, потому как весь функционал дублирован посредством весьма понятных графических обёрток (GUI) и позволяет без какого-либо опыта в Linux взаимодействовать с системой на довольно глубоком уровне.
Под капотом же трудится слегка модифицированное ядро Linux 5.10.74-generic-2rosa2021.1-x86_64 и набор управляющих утилит urpmi (не путать с пакетными менеджерами), дающие возможность весьма шустро управлять системой из консоли. Конечно, не так быстро как в ArchLinux с его pacman, но значительно удобней и быстрее, чем APT в Ubuntu. Перейдём к ПО.
Конечно, не так быстро как в ArchLinux с его pacman, но значительно удобней и быстрее, чем APT в Ubuntu. Перейдём к ПО.
Набор программного обеспечения тоже не разочаровывает. На образ диска, размером чуть больше 2.3 Gb, влезло всё самое необходимое для работы и дома: популярные графические редакторы, видеоплееры, аудиоплееры, клиенты мессенджеров, браузеры, ПО для работы со сканерами. В общем, полноценный набор для системы под ключ.
Тест офиса и видео
Одно дело — говорить и предполагать, а другое — проверить самому. Проведём тестирование ROSA Linux в офисных задачах. Выполним проверку Doc-файлов версии Microsoft Office 2003 на соответствие правильности разметки и скормим местному видеоплееру пару нестандартных медиаформатов.
LibreOffice успешно справился с задачей, никаких проблем с отображением или правильностью разметки замечено не было. Перейдём к видеоплееру.
Запуска таких нестандартных медиафайлов как MOV, 3GP, MVK, даже под Windows, требует установки дополнительных кодеков, не говоря уже про другие танцы с бубном. Попробуем скормить их нашему ROSA Media Player.
Попробуем скормить их нашему ROSA Media Player.
Видеоплеер успешно справился со всеми роликами и не потребовал какой-либо настройки со стороны пользователя, видно, что разработчики ROSA Linux не зря едят свой хлеб.
Тест игр
Если вы ранее уже были знакомы с запуском Windows-игр на Linux, то и здесь нет никаких отличий. Выполним установку Steam. Как я уже упоминал ранее, никакой консоли для установки пользователю не требуется, а вся операция осуществляется через обёртку dnfdragora. Находим пакет, ставим галочку напротив нужной архитектуры и наслаждаемся процессом.
Установка Steam
Установим Wine от Valve и запустим WorldofTanks.
Несмотря на мой слабый ПК и весьма весомую нагрузку из-за захвата видео, мы получаем плавную игру без проблем. Пора переходить к выводам.
Выводы
Разработчикам из «НТЦ ИТ РОСА» удалось создать потрясающий отечественный продукт, за который не стыдно. Простота, продуманная система управления, российская пакетная база и готовность системы для разноплановой работы из коробки, делает ROSA Linux одним из лучших отечественных дистрибутивов способных, не побоюсь этих слов, на равных противостоять Ubuntu, а где-то её и превосходить. В общем, система мне очень понравилась, так что советую всем попробовать, благо версия для дома совершенно бесплатна.
Простота, продуманная система управления, российская пакетная база и готовность системы для разноплановой работы из коробки, делает ROSA Linux одним из лучших отечественных дистрибутивов способных, не побоюсь этих слов, на равных противостоять Ubuntu, а где-то её и превосходить. В общем, система мне очень понравилась, так что советую всем попробовать, благо версия для дома совершенно бесплатна.
Видеоверсия
ROSA Fresh – бесплатная версия операционной системы НТЦ ИТ РОСА
ROSA Fresh является свободно распространяемой версией операционной системы разработанной НТЦ ИТ РОСА.
ROSA Fresh – это современная отечественная операционная система Linux, создаваемая сообществом и легально доступная всем желающим совершенно бесплатно и без регистрации.
ROSA Desktop Fresh R11 – самый свежий релиз операционной системы ROSA Fresh.
Для ROSA Fresh R11 доступны образы с четырьмя окружениями рабочего стола. Остальные варианты будут публиковаться по мере их подготовки сообществом.
Остальные варианты будут публиковаться по мере их подготовки сообществом.
Общие особенности релиза R11:
- Компоненты обновлены до новых стабильных версий, исправлено большое количество ошибок.
- В качестве базового используется ядро Linux 4.15.0-x, основанное на generic-ядре Ubuntu 18.04, с дополнениями и настройками, специфичными для ROSA (например, full preemption, поддержка SELinux вместо AppArmor и т.д.). Другие версии ядра доступны в отдельных репозиториях: x86_64, i586.
- Glibc 2.24 (в режиме обратной совместимости с ядрами Linux до 2.6.32), Qt 5.11.2, GTK+ 3.22, MESA 18.3.4, LLVM 6, GCC 5.
- Добавлена поддержка установки системы на M.2 и NVME SSD.
- В программу установки ROSA добавлена поддержка файловой системы для флэш-накопителей F2FS.
- Графическая подсистема доработана для тех случаев, когда ROSA используется как гостевая система в виртуальных машинах на базе KVM и Hyper-V (в специальных дополнительных образах).
- В установочные образы добавлены файлы firmware для поддержки сканеров Epson.

- По умолчанию используется создание универсального initrd вместо адаптированного под конкретное железо.
- btrfs-progs версии 4.19.1 имеет поддержку сжатия zstd, которая также есть в ядре 4.15 из коробки, что в сочетании с гибким инсталлятором позволяетустанавливать Росу на нестандартные конфигурации с BTRFS (обратите внимание, что Grub еще не умеет грузить систему с BTRFS+ZSTD, поэтому при использовании корня в ZSTD делайте /boot отдельным разделом или дефрагментируйте его в рамках существующего раздела со сжатием в не zstd).
- Появились сборки rootfs для chroot, установки вручную и контейнеров.
В дистрибутиве ROSA продолжают использоваться RPM 5 и urpmi. По сравнению с релизом R10 RPM был доработан:
- В несколько раз ускорен процесс установки и удаления программ за счет отключения принудительного вызова fdatasync() после каждой транзакции, в чем нет необходимости на современных файловых системах.
- Устранено переполнение буфера при установке RPM-пакета с огромным количеством объектов (более 120 тысяч).
- Из RPM 4 в RPM 5 портировано многопоточное сжатие xz, по умолчанию включено использование многопоточного сжатия xz со стандартным сжатием 6 при упаковке RPM и сжатием 2 при упаковке SRPM (подробнее).
- Устранена сильная утечка памяти при работе rpmlint.
Подробнее об операционной системе ROSA Desktop Fresh R11.
Общие принципы всех релизов ROSA:
- Быстрая, без лишних вопросов и настроек установка рабочей системы как готового решения для пользователя (установщик с помощью rsync копирует Live-систему на диск).
- Максимально возможная поддержка различных аппаратных конфигураций, в т.ч. имеются предустановленные нестандартные драйверы для популярных WiFi-адаптеров, поддерживается загрузка на системах с UEFI.
- Переустановка системы с сохранением всех данных пользователя (при условии установки по-умолчанию), что позволяет даже неопытному пользователю самому восстановить работоспособность системы при сбоях (т.е. при автоматической разметке делается отдельный раздел /home, который при переустановке системы будет сохранен и не будет форматирован).
- Большинство необходимых пользователю программ сразу в образе, а остальные ставятся в большинстве своем из наших репозиториев, без серфинга по сайтам производителей и подключения сторонних репозиториев.
- Возможность работы с системой без использования командной строки, в том числе установка проприетарных драйверов для видеокарт через графический или псевдографический интерфейс.
- Можно легко пересобрать любой ISO-образ, внеся необходимые правки.
- Повышенное внимание к русской локализации.
 при автоматической разметке делается отдельный раздел /home, который при переустановке системы будет сохранен и не будет форматирован).
при автоматической разметке делается отдельный раздел /home, который при переустановке системы будет сохранен и не будет форматирован).Следите за нашим Телеграм-каналом, чтобы не пропускать самое важное!
Поделиться:
Свежие новости
- Все новые материалы
- Эксперты
- Электронное правительство
- В регионах
- За рубежами
- Новости
- Актуально
- Аналитика
- Управление интернетом
- Интервью
- Импортозамещение
Подробнее
Подписка на дайджест
- Email(корректный e-mail)
Эксперты
Форум «ПРОФ-IT»
Предварительные условия для ROSA
Начало работы с Red Hat OpenShift Service на AWS (ROSA)
Путь обучения
•
14 ресурсов
•
5 часов 29 минут
•
Опубликовано 13 сентября 2022 г.
Узнайте, как начать работу с Red Hat® OpenShift® Service на AWS, в том числе как использовать AWS Security Token Service (STS) для развертывания кластера.
Узнайте, как начать работу с Red Hat® OpenShift® Service на AWS, в том числе как использовать AWS Security Token Service (STS) для развертывания кластера.
В настоящее время существует два поддерживаемых метода учетных данных при создании службы Red Hat® OpenShift® в кластере AWS (ROSA). В одном методе используется пользователь управления идентификацией и доступом (IAM) с политикой AdministratorAccess (только для учетной записи, использующей ROSA). Другой, более новый и рекомендуемый метод использует AWS с STS. На этом пути обучения мы будем использовать только метод STS.
Следующие шаги позволят вам настроить учетные записи и среду, чтобы вы могли приступить к развертыванию кластера и управлению им.
Настройка учетных записей
- Ознакомьтесь с предварительными условиями перед началом работы.
- Вам потребуется следующая информация из вашей учетной записи AWS:
- Пользователь AWS IAM
- Идентификатор ключа доступа AWS
- Секретный ключ доступа AWS
- Если у вас нет учетной записи Red Hat, создайте ее здесь. Примите необходимые условия. Затем проверьте свою электронную почту на наличие ссылки для подтверждения.

Установка интерфейса командной строки AWS (CLI)
- Установите интерфейс командной строки AWS в соответствии с вашей операционной системой.
- Включите свою учетную запись AWS для использования ROSA, нажав оранжевую кнопку «Включить ROSA» справа. Это займет около минуты, а затем вы увидите зеленую полосу «Сервис включен» вверху.
Установите ROSA CLI
- Установите ROSA CLI в соответствии с вашей операционной системой.
- Загрузите и распакуйте соответствующий файл для вашей операционной системы
- например:
tar -xvf rosa-linux. tar.gz
- например:
- Сохраните его в папке «PATH».
- пример:
sudo mv rosa /usr/local/bin/rosa
- пример:
- Запустите
rosa version, чтобы убедиться, что он работает и возвращает номер версии.
 tar.gz
tar.gz Установка интерфейса командной строки OpenShift
Существует несколько способов установки интерфейса командной строки OpenShift ( oc ):
- Если у вас установлен интерфейс командной строки
rosa, самый простой способ — запуститьроза скачать oc. После загрузки распакуйте (или разархивируйте) файл и переместите исполняемые файлы в каталог в вашем PATH. - Или вы можете загрузить и установить последнюю версию
oc. - Или, если у вас уже есть кластер OpenShift, вы можете получить доступ к странице инструментов командной строки, щелкнув вопросительный знак > Инструменты командной строки . Затем загрузите соответствующий инструмент для вашей операционной системы.

Просмотр страницы консоли Red Hat с нажатым значком вопросительного знака и выделенным меню для отображения параметра загрузки «инструменты командной строки».
Настройте интерфейс командной строки AWS
Если вы только что установили интерфейс командной строки AWS или просто хотите убедиться, что он использует правильную учетную запись AWS, выполните следующие действия в терминале:
- Введите
aws configureв терминале . - Введите идентификатор ключа доступа AWS и нажмите клавишу ввода.
- Введите секретный ключ доступа AWS и нажмите клавишу ввода.
- Введите регион по умолчанию, в который вы хотите выполнить развертывание.
- Введите желаемый формат вывода («таблица» или «json»). Для этого руководства вы можете выбрать «таблицу», так как ее легче читать, но подойдет и то, и другое.
он должен выглядеть следующим образом в качестве примера:
$ AWS Configure
AWS Access ID: AKIA00000000000000000000
AWS Secret Access Key: NGVMP0000000000000000000
.
Проверьте конфигурацию
Проверьте правильность конфигурации.
- Выполните следующую команду, чтобы запросить API AWS:
aws sts get-caller-identity - Вы должны увидеть таблицу (или JSON, если это то, что вы установили выше), как показано ниже. Убедитесь, что информация об учетной записи верна.
$ aws sts получить идентификатор вызывающего абонента -------------------------------------------------- ---------------------------- | GetCallerIdentity | +-------------------------------------------------- ------+------+ | Аккаунт | Арн | Идентификатор пользователя | +-------------------------------------------------- ------+------+ | 000000000000| arn:aws:iam::00000000000:user/myuser | АИДА00000000000000| +-------------------------------------------------- ------+------
Убедитесь, что роль службы эластичного балансировщика нагрузки (ELB) существует.
Убедитесь, что роль службы для ELB уже существует, иначе развертывание кластера может завершиться ошибкой.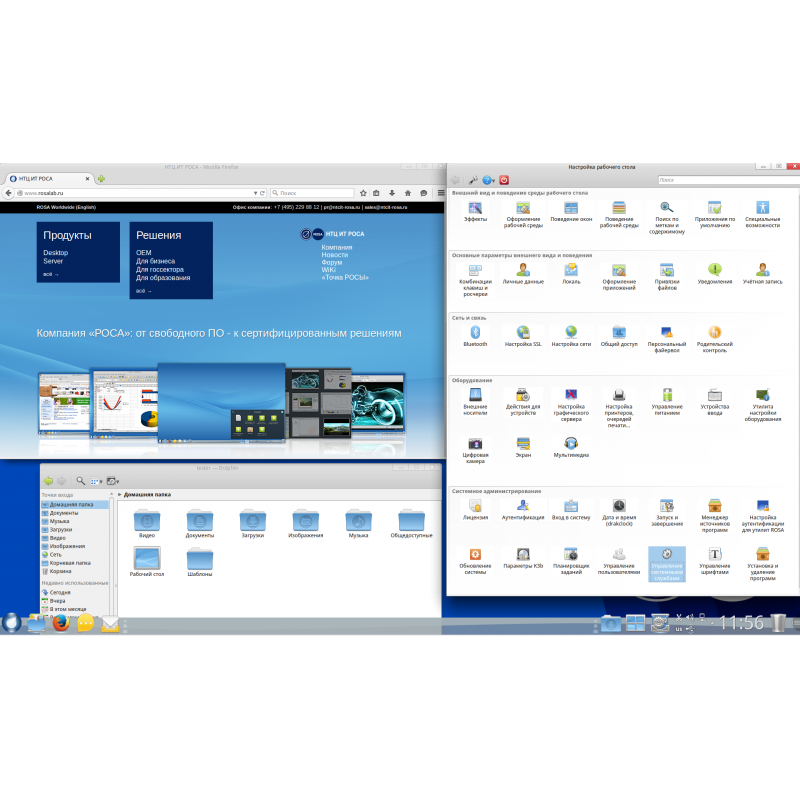 Таким образом, запустите следующее, чтобы проверить роль и создать ее, если она отсутствует.
Таким образом, запустите следующее, чтобы проверить роль и создать ее, если она отсутствует.
aws iam get-role --role-name "AWSServiceRoleForElasticLoadBalancing" || aws iam create-service-linked-role --aws-service-name "elasticloadbalancing.amazonaws.com"
Если во время создания кластера вы получили следующую ошибку, приведенная выше команда должна ее исправить.
Ошибка: Ошибка при создании балансировщика сетевой нагрузки: AccessDenied: Пользователь: arn:aws:sts::970xxxxxxxxx:assumed-role/ManagedOpenShift-Installer-Role/163xxxxxxxxxxxxxxxx не имеет права выполнять: iam:CreateServiceLinkedRole на ресурсе: arn:aws: iam::970xxxxxxxxx:role/aws-service-role/elasticloadbalancing.amazonaws.com/AWSServiceRoleForElasticLoadBalancing"
Войдите в свою учетную запись Red Hat
- Введите
rosa loginв терминале. - Вам будет предложено открыть веб-браузер и перейти на https://console.redhat.com/openshift/token/rosa
- Войдите в систему, используя данные своей учетной записи Red Hat.
- Нажмите кнопку «Загрузить токен».
- Скопируйте токен, вставьте его обратно в командную строку CLI и нажмите клавишу ввода. Кроме того, вы можете просто скопировать полную команду
rosa login --token=abc...и вставить ее в терминал.

Где найти токен API
Проверка учетных данных
Убедитесь, что все настроенные учетные данные верны.
- Run:
Роза ВуамиВы должны увидеть вывод, как показано ниже:
Идентификатор учетной записи AWS: 000000000000 Регион AWS по умолчанию: us-east-2 AWS ARN: arn:aws:iam::000000000000:user/myuser OCM API: https://api.openshift.com Идентификатор учетной записи OCM: 1DzGIdIhqEWy0000000000000000 Имя учетной записи OCM: Ваше имя Имя пользователя учетной записи OCM: [email protected] Электронная почта учетной записи OCM: [email protected] Идентификатор организации OCM: 1HopHfA20000000000000000000 Название организации OCM: Red Hat Внешний идентификатор организации OCM: 0000000
- Прежде чем продолжить, проверьте правильность всей информации.

Проверка квоты
Убедитесь, что ваша учетная запись AWS имеет достаточную квоту в регионе, в котором вы будете развертывать свой кластер.
- Выполнить:
rosa verify quotaОн должен вернуть ответ, например:
I: Проверка квоты AWS... I: Квота AWS в порядке. Если установка кластера не удалась, проверьте фактическое использование ресурсов AWS по адресу https://docs.openshift.com/rosa/rosa_getting_started/rosa-required-aws-service-quotas.html 9.0140
Подробнее о квотах см. в этой документации.
Проверка oc CLI
Проверка правильности установки oc CLI с помощью:
rosa verify openshift-client
Теперь мы успешно настроили нашу учетную запись и среду и готовы развернуть наш кластер с помощью AWS Security Служба токенов (STS) — метод предоставления пользователям краткосрочных динамических учетных данных.
Дополнительная поддержка
- Устранение неполадок с поддержкой Red Hat
- Устранение неполадок с поддержкой AWS
Предыдущий ресурс
Обзор
Следующий ресурс
Что такое STS?
Этот путь обучения предназначен для операционных групп или системных администраторов.
Разработчики могут посетить сайт developer.redhat.com
Начало работы на сайте developer.redhat.com
Обзор ROSA Fresh Desktop 4 – HackMag
РОСА Linux имеет не менее семи вариантов:
- РОСА Enterprise Desktop X 1 рекомендуется для использования в корпоративной среде и предназначен для оснащения рабочих станций и серверов без особых требований к информационной безопасности;
- ROSA Enterprise Linux Server — это, по сути, еще один клон RHEL с некоторыми дополнениями из корпоративного варианта Mandriva;
- ROSA Desktop Fresh — самый свежий дистрибутив, содержащий последние улучшения от разработчика;
- РОСА ХРОМ — дистрибутив, сертифицированный Федеральной службой по техническому и экспортному контролю (ФСТЭК России) и предназначенный для работы с государственными секретами;
- РОЗНИКЕЛЬ имеет такое же назначение, как и предыдущий вариант, но сертифицирован Минобороны России;
- РОСА КОБАЛЬТ сертифицирован ФСТЭК России, в том числе для работы с персональными данными.

К сожалению, последних трех дистрибутивов нет в открытом доступе, и говорить о ROSA Enterprise Desktop и Server не имеет смысла, поэтому в этой статье речь пойдет о недавно вышедшей ROSA Desktop Fresh R5.
Вот краткий список программного обеспечения, включенного в этот дистрибутив:
- Ядро LTS 3.14 с планировщиком BFQ;
- Firefox, обе версии 32 и ESR 24.8.0 доступны в репозитории;
- ЛибреОфис 4.3.1; Репозиторий
- contrib также содержит тестовую сборку плагина Fresh Player, который позволяет использовать плагин Pepper Flash из Chrome в Firefox и других браузерах.
В качестве основного рабочего стола система использует KDE 4 с некоторыми дополнениями от разработчика. Конечно, есть вариант с LXDE, но его мы обсуждать не будем. Файловая система по умолчанию — «ext4», что по современным меркам кажется несколько старомодным.
Недавно разработчики этого дистрибутива перешли на 6-месячный цикл выпуска. Однако пора приступать к установке системы.
При запуске дистрибутива вы можете выбрать между Live DVD и стандартной установкой. Мы обсудим стандартную установку, а затем вернемся к режиму Live DVD. После того, как вы выберете соответствующий пункт и загрузите установщик (пока он загружается, на экране появится симпатичный логотип ROSA), вам будет предложено указать язык. Это не должно быть проблемой. После этого примите лицензионное соглашение. Вот и первый сюрприз. В установщике нет кнопки «Назад». Есть только «Отмена» и «Далее». Это выглядит действительно нелепой ошибкой разработчиков — бывают ситуации, когда эта кнопка жизненно необходима.
Далее действуйте по пунктам выбора клавиатуры, переключения раскладки, часового пояса, тут особо ничего примечательного нет. Но стоит подробнее описать ручную разметку диска. После того, как вы выберете «Разбиение вручную», система отобразит предупреждение о том, что вам необходимо сделать резервную копию ваших данных. Все бы ничего, но это предложение на русском языке выглядит странно, и у меня сложилось впечатление, что оно было переведено автоматическим переводчиком.
В ручном режиме разбивки у вас есть три доступные кнопки: «Очистить все», «Разместить автоматически» (это тоже выглядит немного странно — вероятно, слово «разместить» означает «раздел») и «Экспертный режим». В экспертном режиме можно выбрать файловые системы (по умолчанию все отформатировано в ext4). Стандартное разбиение диска на 32 ГБ выглядит следующим образом: «корневой» раздел (16 ГБ), «своп» (1,7 ГБ) и «/home» для остальных. Если вы внимательно посмотрите на список доступных файловых систем, то заметите, что он подозрительно обширен. Однако, если присмотреться, то окажется, что этот список — не что иное, как перепечатка типов файловых систем (без их кодов) со старого доброго «fdisk». Это не делает чести разработчикам.
Список файловых систем, предположительно поддерживаемых дистрибутивом
После этого сразу начинается установка, нет ни предупреждений, ни выбора пакетов. Во время установки вам придется посмотреть немного рекламы. К счастью, это не занимает много времени. Далее необходимо выбрать параметры загрузчика. После того, как вы настроили (и установили) его, вам необходимо установить пароль root. Удивительно, но на этом этапе вы можете установить односимвольный пароль, установщик просто пометит это открытым замком без каких-либо запросов.
Далее необходимо выбрать параметры загрузчика. После того, как вы настроили (и установили) его, вам необходимо установить пароль root. Удивительно, но на этом этапе вы можете установить односимвольный пароль, установщик просто пометит это открытым замком без каких-либо запросов.
Следующим шагом является создание нового пользователя. Вроде бы все нормально… но во время установки можно создать только одного пользователя. Далее вы можете указать имя хоста. Последним шагом перед перезагрузкой системы является выбор служб, которые запускаются при запуске. «Sshd» отключен по умолчанию. Хотелось бы, чтобы для последнего разработчики предоставили более понятное описание, так как не все начинающие пользователи могут знать, что это такое.
При загрузке системы в режиме Live DVD шаги первоначальной настройки (вплоть до часового пояса) будут абсолютно идентичными. Далее, после небольшого ожидания, вы увидите чистый рабочий стол KDE с панелью. Выглядит, конечно, эстетично, но, боже мой, как начинающий пользователь (а этот дистрибутив и рассчитан на них) может догадаться, что для его установки нужно нажать на нижнюю левую иконку, выбрать «Приложения». ' и найти там 'Live Installer'? Не лучше ли разместить его на рабочем столе, как в Ubuntu? Кроме того, при одновременном запуске, например, установщика и браузера, первый через некоторое время зависнет.
' и найти там 'Live Installer'? Не лучше ли разместить его на рабочем столе, как в Ubuntu? Кроме того, при одновременном запуске, например, установщика и браузера, первый через некоторое время зависнет.
А теперь перейдем от установки к использованию.
После перезагрузки (стоит отметить, что DVD не извлекается автоматически) система отобразит локализованное меню Grub 2, в котором, кстати, нет упоминания о каком-либо режиме восстановления — хотя это может быть полезно для начинающих Линукс. Системе потребовалось около 23 секунд, чтобы отобразить экран входа в систему. Этот экран выглядит довольно эффектно и, в то же время, не перегружен лишними опциями.
Экран входа в систему
После входа в систему вы обнаружите, что рабочий стол (так же, как и в режиме Live DVD) абсолютно чист — в нижних углах сбиваются лишь несколько иконок. Хочу отметить, что при наведении мышки на большинство иконок будет отображаться подсказка, а при наведении на иконку ROSA никакой подсказки нет.
После того, как вы нажмете на этот значок, система отобразит Simple Welcome — функцию, разработанную командой ROSA и предназначенную, по словам разработчиков, для удобной группировки приложений. На самом деле эта функция подозрительно напоминает аналогичный инструмент в Ubuntu Unity — там то же окно поиска, то же расположение иконок…
Simple Welcome Launcher
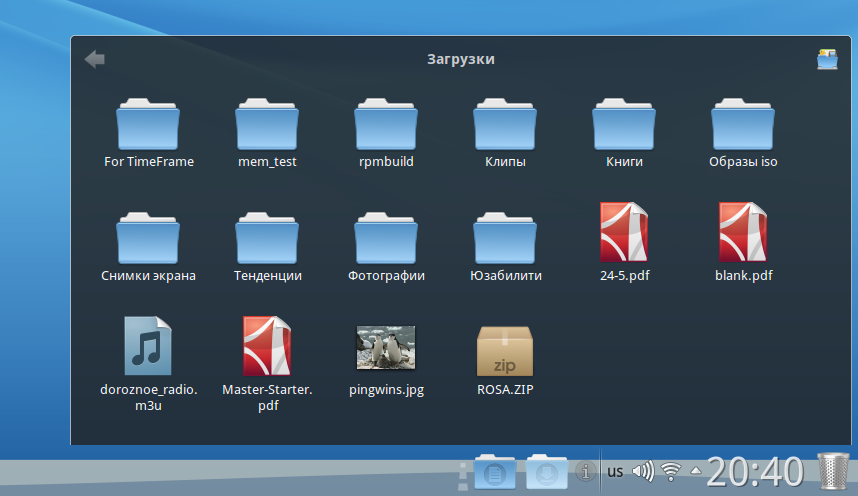
TimeFrame — еще одна функция, разработанная командой разработчиков. Это инструмент, который позволяет вам отслеживать, когда и какие файлы вы открывали. Также позволяет просматривать видео в миниатюре и зачем-то есть интеграция с социальными сетями (в том числе Вконтакте). Все это выглядит довольно привлекательно, но при серьезном использовании дистрибутива вам будет не хватать возможности изменять шкалу времени.
Еще одна вещь, которая бросается в глаза, это то, что иногда Simple Welcome не показывает некоторые приложения, установленные в системе. Это означает, что процедура запуска приложения, отсутствующая в стандартном наборе, предоставляемом данным лаунчером, может стать нетривиальной задачей для новичков.
Но тут в правом углу загорается красный индикатор — доступны новые обновления. При нажатии на значок система отображает окно со списком обновлений. Коробка примечательна только одним — ее название (в частности, кнопка закрытия коробки) вызывает ассоциации с Windows (начиная с Windows 7). Для обновления не требуется никакого пароля, и, если после его завершения системе потребуется перезагрузка, она отобразит сообщение с указанием конкретных пакетов, требующих перезагрузки. Возможно, вам придется обновиться дважды — в первый раз это коснется менеджера репозиториев и пакетов, а во второй раз — всего остального.
Обновление ПО
Набор программ стандартный для подобных дистрибутивов и включает в себя Firefox, LibreOffice, а также k3b (учитывая, что РОСА основана на KDE). У Firefox нет проблем с обработкой Flash — Flash Player (хотя его версия довольно старая из-за политики Adobe) доступен в системе. Если вам нужна более новая версия Flash Player, вы можете установить пакет «freshplayerplugin», который позволит вам использовать проигрыватель, входящий в состав Chromium.
LibreOffice запускается примерно 7 секунд, что очень много, если сравнивать, например, с Ubuntu. Особых отличий от «официального» LibreOffice я не заметил. В качестве почтового клиента система использует Thunderbird, который не нуждается в особом представлении.
В качестве просмотрщика PDF использует Okular, который также позволяет просматривать другие форматы, такие как FB2 (без сомнения, это порадует тех, кто любит читать на компьютере).
Дистрибутив хорош и в плане мультимедийных возможностей, в нем нет проблем с воспроизведением видео и MP3 (в случае с MP3 проблем с кодировками не заметил). Это неудивительно, так как дистрибутив российский и не подпадает под патентные ограничения США.
Что касается развлечений, то в репозиториях много игр. Существует даже Doomsday, одна из портированных версий Doom, которая довольно хороша и требует (как и все другие портированные версии) оригинальных файлов WAD. А если вы хотите поиграть в какую-нибудь другую ретро-игру, DOSBox к вашим услугам.
В качестве клиента BitTorrent система использует Ktorrent. Он автоматически открывает торрент-файлы, загруженные Firefox, а также магнитные ссылки. Ktorrent имеет множество настроек от полосы пропускания до шифрования.
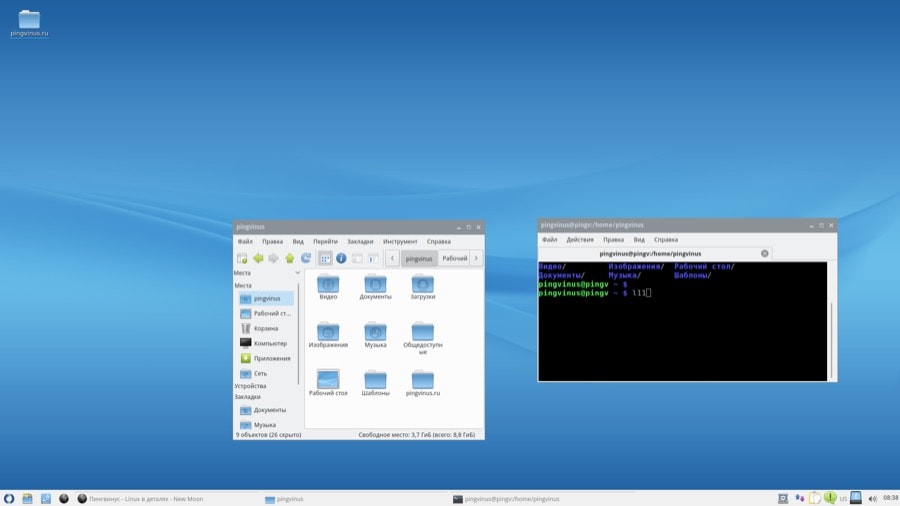
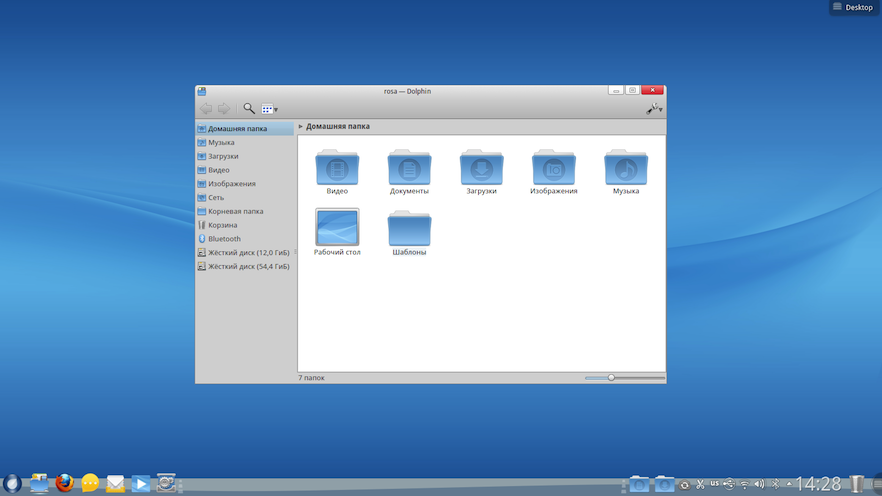
В этом дистрибутиве файловый менеджер KDE Dolphin выше всяких похвал. Мало того, что он неплохо выглядит в дистрибутиве, так еще и не имеет проблем с просмотром сети Windows — и это несмотря на то, что такие проблемы встречаются в некоторых дистрибутивах от крупных разработчиков. Более того, это первая раздача, где я обнаружил поддержку ACL в стандартном файловом менеджере, хотя раздача не предназначена для корпоративного использования. Однако есть и ложка дегтя — при установке ACL Dolphin не проверяет, поддерживаются ли они в данной файловой системе и, если такой поддержки нет, не выводит об этом никакого сообщения.
Добавление ACL в Dolphin
В качестве интерфейса к Network Manager система использует Plasma NM, который поддерживает множество типов соединений — от Wi-Fi до OpenVPN. Кстати, в случае с Wi-Fi есть один нюанс. Если вы подключаетесь напрямую из Plasma NM, пароли не сохраняются. Для их хранения необходимо указать пароли в настройках. Это может быть полезно, если вы много путешествуете и не хотите загромождать ноутбук лишними сетевыми настройками.
Кстати, в случае с Wi-Fi есть один нюанс. Если вы подключаетесь напрямую из Plasma NM, пароли не сохраняются. Для их хранения необходимо указать пароли в настройках. Это может быть полезно, если вы много путешествуете и не хотите загромождать ноутбук лишними сетевыми настройками.
[efspanel style="" type=""]
[efspanel-header]
Установка Skype в ROSA Linux
[/efspanel-header]
[efspanel-content]
Репозитории ROSA также включают Skype. Чтобы установить его в 64-битном дистрибутиве Linux, выполните следующие команды:
# urpmi add32to64media
# urpmi --auto-update
# urpmi get-skype
# urpme add32to64mediaТеперь вы можете безопасно использовать его совершать звонки.
[/efspanel-content]
[/efspanel]Есть также графические инструменты настройки. Однако по неизвестным причинам большинство из них можно вызвать только из командной строки. Поскольку дистрибутив фактически является преемником Mandriva (который, в свою очередь, был преемником Mandrake), все названия инструментов настройки начинаются с «drak».
А теперь плавно переходим к внутренней работе этого дистрибутива.
Ядро и система инициализации
В качестве ядра система использует LTS 3.14. Но имя ядра по умолчанию включает «nrj». Это означает, что ядро оптимизировано — в частности, оно использует планировщик ввода-вывода BFQ и работает в режиме мягкого реального времени. Кроме того, настольные компьютеры, ноутбуки и нетбуки используют разные ядра с разными таймингами планировщика.
В репозиториях есть и другие ядра — как «обычные ванильные», так и серверные.
В качестве системы инициализации в этой линейке дистрибутивов используется systemd, что означает отказ от старых утилит service и chkconfig и переход на journald. В то же время утилита с графическим интерфейсом drakxservices по-прежнему запускает старые инструменты.
Сеть
Здесь раздача выглядит очень стандартно — интерфейсы имеют те же имена, что и в старые времена, а возможность подключения обеспечивается Network Manager.
Строго говоря, это обертка не только вокруг iptables, но и утилит tc и ip (входит в состав iproute2). Он поддерживает много интересных функций (например, Multi ISP, когда у вас несколько провайдеров, в случае обычных «iptables» это может усложнить настройку), добавляет уровень абстракции, относительно прост в настройке и даже позволяет писать свои собственные модули. .
В качестве графического интерфейса вы можете использовать «drakfirewall», но этот инструмент имеет ограниченную функциональность, которая не отражает даже небольшой доли функций Shorewall.
Управление пакетами
Как преемник Mandriva, дистрибутив использует urpmi, который поддерживает установку пакетов как из внешних репозиториев, так и из файлов пакетов (в этом случае, в отличие от обычного 'rpm', он попытается разрешить зависимости).
Для поиска вы можете использовать ‘urpmq’.
'# urpmq libreoffice'покажет только пакет с именем «libreoffice», но команда
'# urpmq --fuzzy libreoffice'покажет, среди прочего, локализованные пакеты.
Также есть функция, аналогичная точкам восстановления в Windows. Это обеспечивается командой «urpmi.recover». Для того, чтобы начать мониторинг состояния системы, выполните команду:
# urpmi.recover --checkpointУказывает системе управления пакетами отслеживать установленные пакеты и, при необходимости, помещать старые версии пакетов в каталог ‘/var/spool/repackage’. Для отката можно использовать следующую команду:
# urpmi.recover --rollback "2014-12-20 12:00:00"По умолчанию система использует количество секунд, прошедших с эпохи UNIX, но вы также можете указать время в указанном выше формате.
# urpmi.recover --rollback "1 день назад"Чтобы отключить отслеживание (и очистить кэш пакетов для перехода на более раннюю версию), используйте следующую команду:
# urpmi.recover --disableСуществует также команда «rurpmi», предназначенная для запуска от непривилегированного пользователя под «sudo». Он ограничивает установку только подписанными пакетами, предотвращает установку локальных пакетов, а также запрещает их принудительную установку.
В качестве GUI система использует drakrpm, который своим минимализмом очень напоминает PackageKit, аналогичный инструмент от Red Hat. С его помощью можно вызвать управление репозиториями (в терминологии ROSA Linux они называются «источники»). Однако реализация поиска довольно неинтуитивна. Чтобы найти пакет, вы должны сначала указать «Все» в качестве области поиска.
Графическая утилита управления пакетами
Безопасность
В качестве MAC-адреса ROSA Linux (по крайней мере, ее линейка Fresh Desktop) использует Tomoyo, систему защиты, разработанную в Японии с 2003 года под руководством NTT DATA.
В отличие от SELinux, Tomoyo не использует расширенные атрибуты файловой системы — все файлы, к которым обращается приложение, должны быть указаны в файлах политик. И для каждого приложения система может применять набор опций, называемый профилем. Он позволяет указать, какие параметры безопасности следует отслеживать.
Кроме того, в Tomoyo есть условные операторы, хотя тестовых условий не так много. Например, следующие строки в редакторе политик указывают, что для процесса «/bin/dd», запущенного из «bash», разрешено чтение блочных устройств, если «uid» равен «0»:
<ядро> /bin/bash /bin/dd чтение файла /dev/* pathl.type=block task.uid=0Кроме того, чтобы облегчить создание политик, Томойо имеет возможность обучения.
В репозиториях есть графическая утилита настройки, но ее нельзя использовать. В пакетах, связанных с Tomoyo, нет файлов политик, хотя пакет официально поддерживается командой ROSA.
Среди инструментов, связанных с безопасностью, также стоит упомянуть утилиту «draksec», которая устанавливает правила пароля для инструментов настройки.
Управление безопасностью
Конечно, нелепо сравнивать дистрибутив от российского разработчика с такими гигантами, как RHEL, Ubuntu или SUSE (хоть он и является наследником Mandriva). Тем не менее, для российского пользователя со средними знаниями о настройке Linux он вполне подходит — в нем есть офисный пакет и браузер, и больше ничего не нужно.
Для других категорий пользователей его развертывание кажется спорным. Дистрибутив подойдёт новичку, но… есть небольшие недостатки (например, абсолютно чистый рабочий стол может смутить того, кто хочет перейти на Linux с другой десктопной ОС).
Сюда входит, конечно же, менеджер репозиториев. Когда-то, когда «yum» был еще в зачаточном состоянии, а Ubuntu даже не была на стадии проектирования, «urpmi» была очень полезной утилитой. Однако сейчас это выглядит несколько архаично; к тому же крайне мало репозиториев, которые можно было бы с ним использовать. С другой стороны, отличительной чертой современного дистрибутива является наличие собственного репозитория. В противном случае это просто клон.
Безопасность оставляет желать лучшего. Выбор малоизвестного (хоть и включенного в ядро) LSM Tomoyo, у которого, к тому же, нет предустановленных политик, выглядит как минимум странно. Это может быть связано с тем, что этот дистрибутив ориентирован на рабочий стол, но в таком случае включать этот пакет в репозиторий не имеет смысла.
Подводя итог, ROSA Linux Fresh Desktop вызывает смешанные чувства. Его можно рекомендовать тем, кто когда-то работал с Mandriva или хочет поддержать отечественных разработчиков.
 Например, чтобы начать настройку некоторых вещей, связанных с безопасностью, вам нужно ввести «draksec», а для поиска в логах — «drakkog».
Например, чтобы начать настройку некоторых вещей, связанных с безопасностью, вам нужно ввести «draksec», а для поиска в логах — «drakkog».  Единственная разница в том, что Shorewall используется как оболочка для iptables. Он заслуживает более подробного описания.
Единственная разница в том, что Shorewall используется как оболочка для iptables. Он заслуживает более подробного описания.  В этом случае помните, что по умолчанию, когда имя пакета совпадает с информацией, указанной в поле поиска, система показывает только этот пакет. Чтобы отобразить все пакеты, используйте параметр «–fuzzy». Например, команда
В этом случае помните, что по умолчанию, когда имя пакета совпадает с информацией, указанной в поле поиска, система показывает только этот пакет. Чтобы отобразить все пакеты, используйте параметр «–fuzzy». Например, команда  Вы даже можете запустить следующую команду:
Вы даже можете запустить следующую команду: На данный момент у него есть две ветки — 1.8 и 2.5. Они отличаются довольно существенно. Вторая ветка использует стандартные функции LSM, что позволило включить ее в основную ветку ядра. Именно эта вторая ветвь используется в дистрибутиве.
На данный момент у него есть две ветки — 1.8 и 2.5. Они отличаются довольно существенно. Вторая ветка использует стандартные функции LSM, что позволило включить ее в основную ветку ядра. Именно эта вторая ветвь используется в дистрибутиве. То есть, когда вы запускаете программу, вы можете запустить ее через типовые задачи и определить правила на основе файлов журнала.
То есть, когда вы запускаете программу, вы можете запустить ее через типовые задачи и определить правила на основе файлов журнала. Более опытным пользователям некоторые функции этого дистрибутива могут показаться необычными.
Более опытным пользователям некоторые функции этого дистрибутива могут показаться необычными.